
Robust Optical Transceiver Manipulation in Cluttered Cable Environments Using 3D Scene Understanding and Planning
- Iason Sarantopoulos ,
- Chenyu Liu ,
- Bohong Weng ,
- Sicheng Xu ,
- Yizhong Zhang ,
- Jiaolong Yang ,
- Xin Tong ,
- Fabian Otto ,
- David Sweeney ,
- Andromachi Chatzieleftheriou ,
- Ant Rowstron
2025 IEEE International Conference on Robotics and Automation |
Published by IEEE
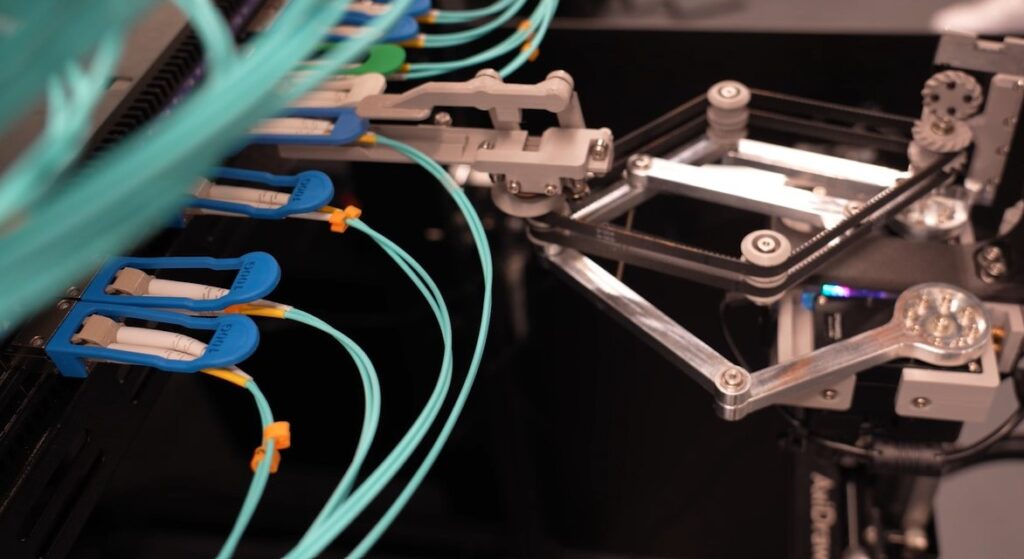
Robotic manipulation in cluttered environments presents significant challenges, particularly when the clutter includes thin, deformable objects like cables, which complicate perception and decision-making processes. In the context of datacenters, the automation of networking tasks often involves the manipulation of optical transceivers within densely packed cable configurations. Such environments are characterized by an abundance of delicate, overlapping, and intersecting cables, leading to frequent occlusions. This paper introduces an innovative system designed for the manipulation of optical transceivers in environments cluttered by cables. Our integrated approach combines advanced 3D scene understanding with a heuristic-based pushing policy to effectively manipulate optical transceivers amidst clutter. The system’s perception component utilizes image segmentation and 3D reconstruction to accurately model the transceivers and surrounding cables. Meanwhile, the planning aspect employs a search algorithm with task-specific heuristics, to navigate the gripper, displace obstructing cables, and safely achieve a precise pre-grasp position in front of the target transceiver. We have conducted extensive evaluations of our methodology in both simulated and real-world settings, demonstrating its high success rates, robustness, and proficiency in addressing the unique challenges posed by cable-occluded environments within datacenters.